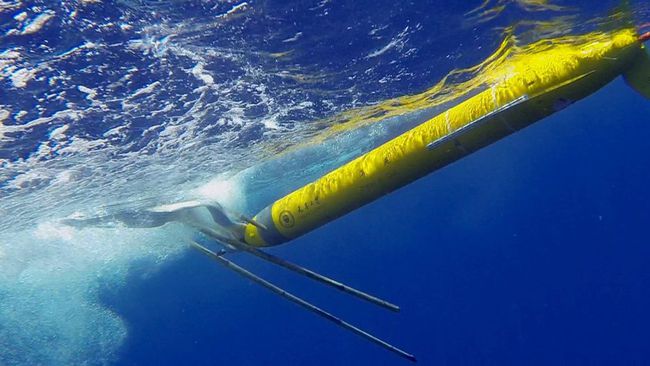
提到滑翔机,通常都会让人联想到有着巨大翼展、仅依靠空气动力便能在空中翱翔的空中滑翔机,其实,水下滑翔机作为一种新型水下机器人,也可以借助水动力实现在深海中的“自由飞翔”。
中国以“海燕”、“海翼”系列为代表的水下滑翔机通过搭载各种传感器可以大范围地观测和获取海水的温度、盐度、浊度、叶绿素、含氧量及洋流变化等信息,对中国开发海洋资源、预防灾害等发挥着日益重要的作用。
滑翔机也能在水下“飞”起来?
一般的空中滑翔机没有动力装置,当滑翔机飞行时,通过滑翔机俯仰捕捉空中的上升气流从而保证持续不断地飞行,当上升气流消失,就会在一边下滑一边滑翔飞行中凭自身重力继续前行。
水下滑翔机则借鉴了航空领域滑翔机的经验,设法让一个“鳍”在水中沉浮运动,然后通过一对“机翼”和“尾翼”控制“船体”的姿态,从而将沉浮运动变成向前运动,通过以上动作的反复循环并借助固定翼的水动力,水下滑翔机就可以在水下进行所谓的“滑翔”运动了。
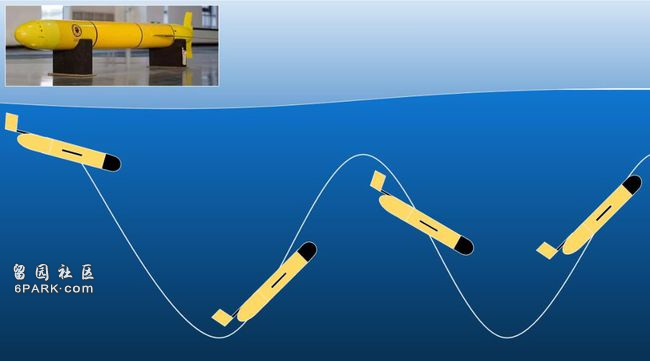
(特殊的动力模式使得水下滑翔机的行驶轨迹也“不走寻常路”)
传统海洋观测,高度依赖固定系泊设备和海面船只,严酷的海洋水文条件给水下观测作业带来诸多风险和挑战。而水下滑翔机因其能源消耗少,续航能力强等特点,可作为绝佳的水下观测设备平台。
“小鱼鳔”高效“膨胀”的秘密在这里
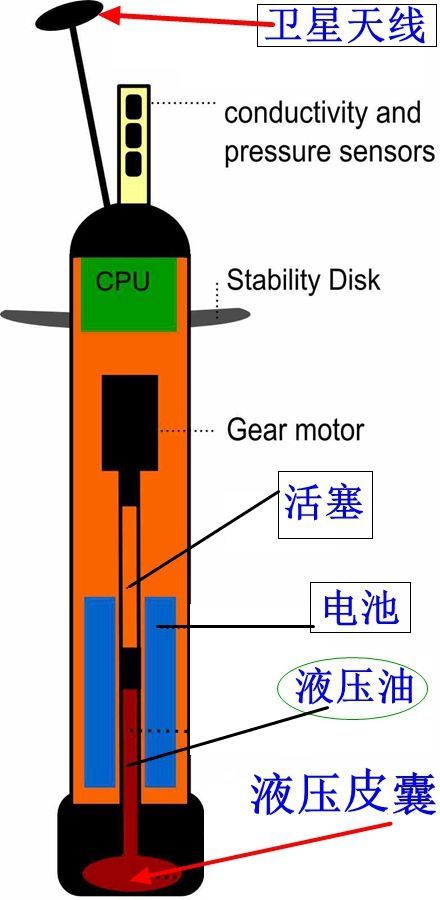
由于水下滑翔机在前行时是通过浮力的调节控制航行速度和方向前行的,而决定航行性能关键的就是在水下滑翔机内两个类似鱼鳔的囊体——浮力调节系统。
近年来,国内外水下滑翔机大多利用不同深度温差实现“无限续航”,这种“水下滑翔机”使用一种热敏工质,这种工质在较冷的深海中会凝结,在较热的上层海水中会熔化,“水下滑翔机”通过一组阀门控制工质来回流动。
采用这样的技术后,“水下滑翔机”用电量更少,可进一步提升其续航能力,但这种技术需要水下滑翔机主要作业环境处于深海,两种海水有较大的温差才能工作,而对于中国南海水团复杂的水文环境,水下滑翔机必须适应多种水文特征才能确保顺利作业。
为此,国内研发团队提出的电力/温差混合驱动技术,解决了温差动力“水下滑翔机”难以在浅海工作的缺陷。
水下滑翔机的浮力控制系统原理并不复杂,但对其自动化控制和机械可靠有较高的要求,而浮力调节系统中,核心部件就是控制液压流量的液压泵。
国外水下滑翔机利用耐压舱内负压实现油液的自动回流,并配合柱塞泵作为主泵驱动油液外流节省回油过程的能耗。但深海之中,浮力系统的响应性能受外部水压影响大,液压泵的出口外具有高压的情况下,泵口很容易产生气泡并造成吸油失效,使得浮力系统无法正常控制皮囊内液压油量,影响水下滑翔机的安全运行。
为了保障“海燕”们能在深海作业时自由“沉浮”,中国科研人员为海燕浮力系统内的液压泵设计了一套独特的空气增压与液压结合的浮力调节系统。
系统将内油囊整体密封于气动增压系统中,并采用空气泵作为主要动力原件,利用两个微型气动电磁球阀实现抽压与增压的转换,一个正负压传感器反馈增压舱内的压力变化,为压力控制提供依据。
当“海燕” 达到设定深度开始上浮时,出油油路工作,主泵转动并且空气系统增压,将油液从低压环境下的内油囊输送到高压环境下的外油囊,此时机体浮力变大;当滑翔机近水面时,回油油路工作,电磁阀通电开启、空气增压系统降压,此时油液从高压的外油囊经过回油油路回流到具有一定负压的内油囊为下一次的下浮积蓄力量。
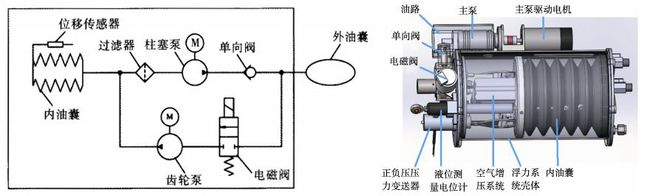
(该部件的研制使得的浮力系统在深海作业时依然保障了极高的可靠性与压力调节效率)
试制中,中国科研团队利用这套系统在3分钟内将浮力装置的油囊体积迅速调节0.6L,较好地解决了单一柱塞泵在深海高压环境下自吸能力较差、响应速度慢的问题。
此外,研究人员对浮力调节系统的其他部件也进行了改进,如采用浮力调节液压系统整体阀块的设计,改善了原先油路软管密布的现象,在降低压力损失的同时也减少了油路阻塞的可能性,从而帮助“海燕”们实现较快的下潜、上浮状态切换。
深海“飞翔”全靠这对灵巧小“翅膀”
水下滑翔机通过浮力转化为推力实现了更耐久续航,但面对变化多端的洋流,水下滑翔机所需要的不仅仅是“随波逐流”。
深海监测任务的多样化,对水下滑翔机航行经济性、稳定性和机动性提出了较高要求。例如在长时滑翔过程中,航行经济性和稳定性是关键性能;当滑翔机遇到障碍物,需要做转弯运动时,机动性成为了短时间内关键性能而机翼作为水下滑翔机的核心部件之一,对水下滑翔机的航行性能具有决定性的作用。

与空气动力飞行器类似,通过观察升阻比也能衡量水下滑翔机的机动性,而决定升阻比的关键之一即是水下滑翔机的机翼设计。
传统水下滑翔机大多采用固定角度的平板机翼,这种翼型强度高且易于生产,而在低速滑翔状态下,也能为水下滑翔机提供足够的升阻比,但在高速滑翔状态下升阻比则较为有限,影响了水下滑翔机的水下机动性能。
为此较新型号的“海燕”、“海翼”们采用了特定几何参数的NACA翼型来提高水下潜行的升阻比,并通过双齿轮齿条机构控制改变机翼后掠角和展弦比以进一步提高滑翔经济性与稳定性。
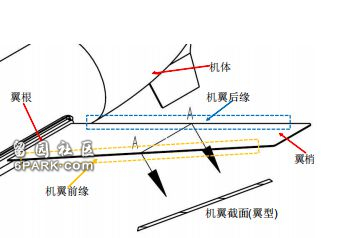
(“海燕”水下滑翔机机翼模型)
除了可变后掠角等手段外,较新型号“海燕”、“海翼”型水下滑翔机还实现了柔性后缘技术的突破。
它通过一体化柔性蒙皮构成无缝接合的可弯曲、可扭转的翼面,应用小型舵机通过丝传动的方式完成机翼后缘的变形动作,在一定的运动情况下适当改变后缘弯折角度实现机翼的复杂弯、扭形变,为水下滑翔机提供一个额外的阻尼力和阻尼力矩。
当滑翔机在水下航行时,通过测量运动速度及姿态角的自适应控制机翼后缘弯折角度,可以极大地提升水下滑翔机的航行经济性和机动性,且不会影响滑翔机的航行稳定。
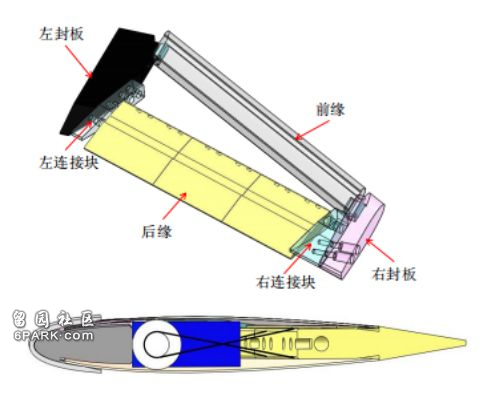
(水下滑翔机柔性后缘机翼结构图)
水中不迷路还靠这根小“尾巴”
水下滑翔机在对海洋温度、密度、深度、潮汐、海流等进行观测任务中,通过配备收集关键数据的传感器实现长时间、大范围的测量,并在航行途中,通过卫星通讯模块将获取的重要数据回传给岸站控制中心,因此卫星通讯系统是航行作业时水下滑翔机和岸站控制中心唯一的通讯桥梁。
高速、及时的数据传输和精准的卫星定位对水下滑翔机按照要求完成姿态调整、航迹规划也起到至关重要的作用,一旦没有精准地定位,不仅海洋观测任务无法顺利开展,水下滑翔机本身也很容易“掉线”。
为此,中国科研人员设计了一种集成三轴加速度计和三轴陀螺仪的微机电系统惯性测量单元、北斗卫星定位系统接收模块、电子罗盘、三轴磁力计、压力计、数字信号处理模块等设备的组合导航系统,来实现水下滑翔机导航定位的要求。
考虑到深海作业和海面风浪等因素,研发人员将卫星通讯模块采用长筒型封装形式集成装配到滑翔机尾部,从而通过姿态控制把天线最大限度抬离水面,并与卫星等终端建立稳定通信,源源不断地传输位置、姿态、状态和采集到的各类海洋特征数据。

(正在探出“小尾巴”传输数据的国产水下滑翔机,图源自海洋国家实验公众号)
结语
近年来中国已经大量使用包括水下滑翔机在内的无人潜航器进行科考作业,大大提高了对海洋环境的认知。而随着中国海洋科考的不断深入,未来中国科研人员将着力研发水下续航时间更长、下潜更深的水下滑翔机,在中国广阔的海域开展科学观测。
这些不同类型的水下机器人在不断刷新深海纪录的同时,更将为我们认识生命摇篮探出新的视野。


